随着智能家居清洁设备的快速发展,各大品牌纷纷推出带机械臂的扫地机器人,试图解决传统扫地机无法处理复杂环境的问题。然而,大多数产品在机械臂的设计和功能上仍存在明显局限。
Krabot通过创新的"背部机械臂"设计,彻底颠覆了传统思路,不仅保留了扫地机器人的基础清洁能力,还大幅提升了环境交互能力,真正实现了智能清洁的突破。
下方展示了市场上主流带机械臂扫地机器人的对比,突显了Krabot的独特优势:
深入了解Krabot如何在机械臂设计和功能性方面领先于市场竞争对手
随着智能家居清洁设备的快速发展,各大品牌纷纷推出带机械臂的扫地机器人,试图解决传统扫地机无法处理复杂环境的问题。然而,大多数产品在机械臂的设计和功能上仍存在明显局限。
Krabot通过创新的"背部机械臂"设计,彻底颠覆了传统思路,不仅保留了扫地机器人的基础清洁能力,还大幅提升了环境交互能力,真正实现了智能清洁的突破。
下方展示了市场上主流带机械臂扫地机器人的对比,突显了Krabot的独特优势:
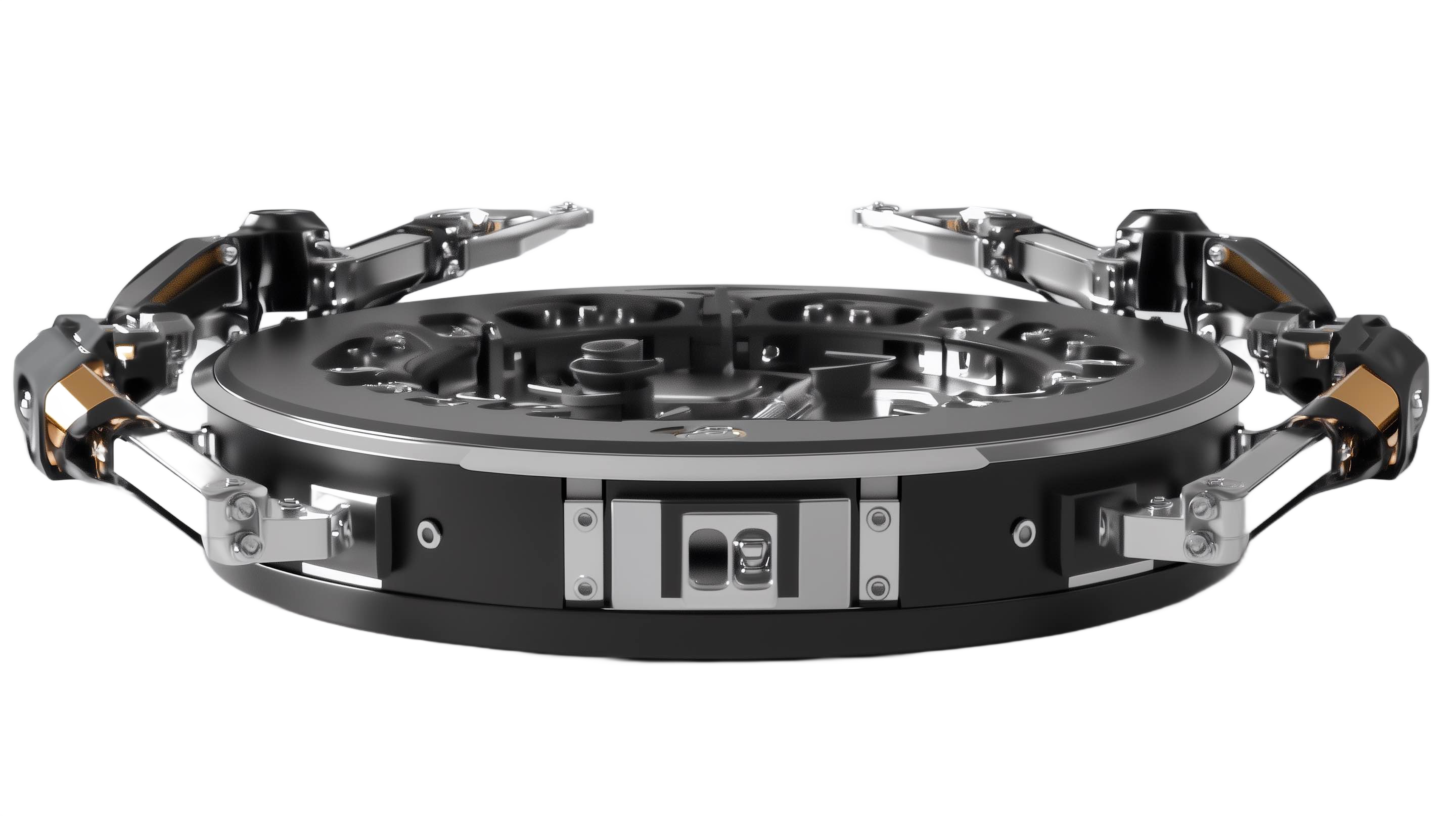
| 机械臂形态 | 仿生蟹式多关节机械臂 |
|---|---|
| 安装位置 | 机身顶部(可拆卸) |
| 主要功能 | 物品移动、障碍物处理、精细清洁、环境预处理 |
| 主要优势 | 创新分体式设计,不影响低矮空间清洁;6轴自由度提供全方位操作能力;支持VR遥操作 |

| 机械臂形态 | 折叠式机械臂 |
|---|---|
| 安装位置 | 机身内部 |
| 主要功能 | 拾取地面异物 |
| 主要问题 | 单臂灵活度有限,夹取范围和力度受限,占用机身内部空间 |

| 机械臂形态 | 顶置折叠机械臂 |
|---|---|
| 安装位置 | 机身顶部 |
| 主要功能 | 拾取地面杂物 |
| 主要问题 | 上盖式设计增加整体高度,机械臂强度与重量平衡难以控制 |
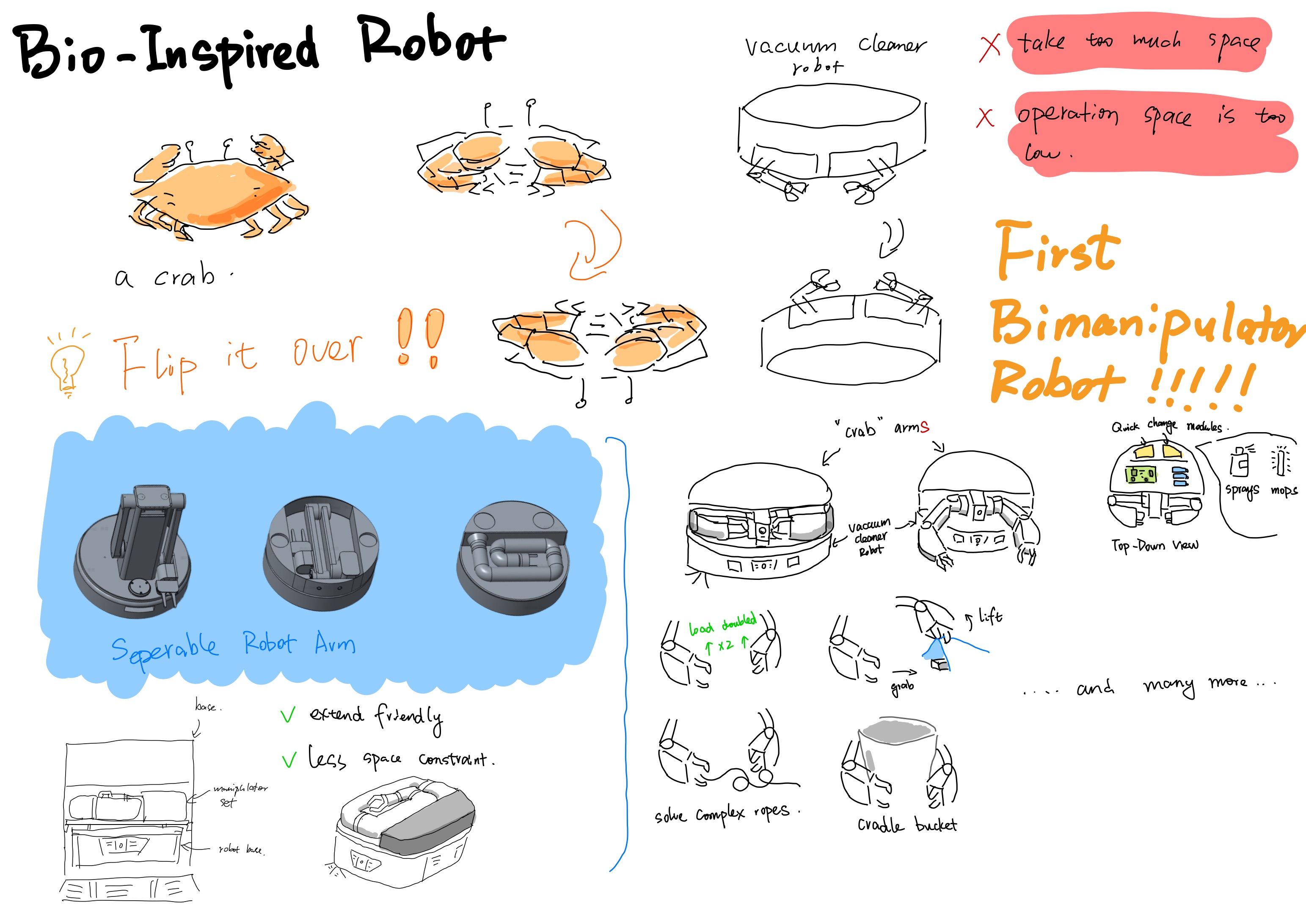
Krabot技术手稿 - 展示了仿生蟹式机械臂的创新设计,与传统机械臂形成鲜明对比
机械臂扫地机器人市场正处于技术演进的关键阶段,通过对当前产品的分析,我们总结出以下行业趋势:
机械臂"上车"已经开始,但还处于早期探索阶段,目前主要以"单臂"为主,功能以简单的拾取为核心,远未形成真正的"操作型清洁机器人"。
现有设计普遍以"嵌入本体"为主,这种做法导致:
基于当前行业趋势,Krabot的分体式设计代表了未来发展的可能方向,通过将机械臂模块化并置于机身顶部,不仅解决了空间占用问题,还大幅提升了操作灵活性和功能多样性。
通过深入分析行业现状和技术演进路径,我们可以清晰地看到为什么美的能够在双臂机器人领域实现突破:

单臂机器人处理柔性物体 - 效率低下且易失败
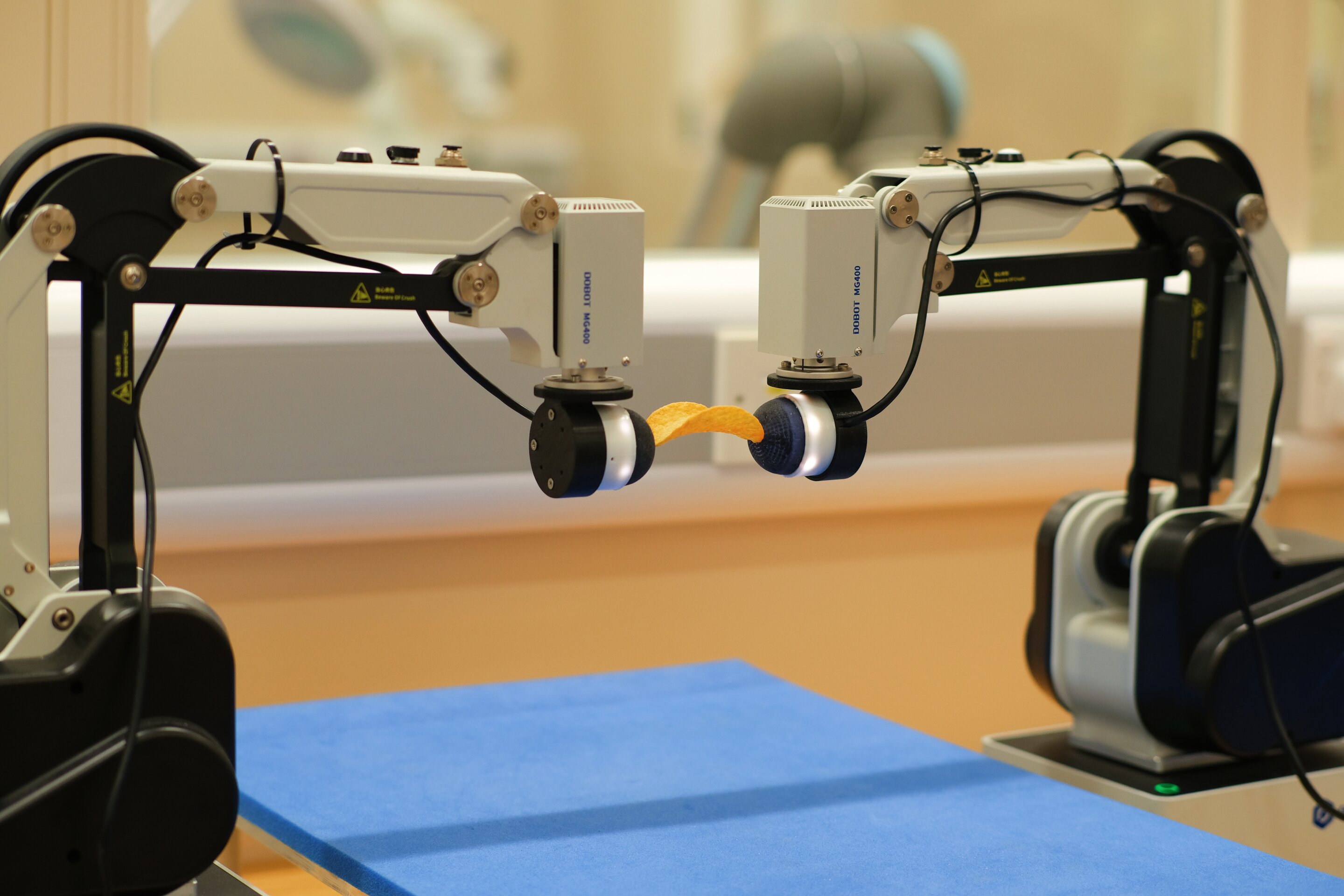
双臂机器人协同作业 - 高效处理复杂物体搬运任务
对比显示:双臂协同作业能显著提升复杂物体处理效率,尤其是在处理柔性物体时,双臂配合可以实现稳定可靠的抓取和搬运
Krabot双臂机器人技术的突破不仅是硬件创新,更是对整个技术范式的重新定义。我们解决了长期困扰行业的核心问题:为何之前做不到,而现在可以做到?
系统能识别常见物品,辅助用户完成基础抓取,但主要依赖人工操控
系统能在特定场景(如桌面物品整理)自主完成任务,复杂场景仍需人工介入
系统能在大多数家庭环境下自主完成任务,仅极端情况需人工介入
这种渐进式路径允许产品在不完美的情况下仍能创造实际价值,同时持续进化。
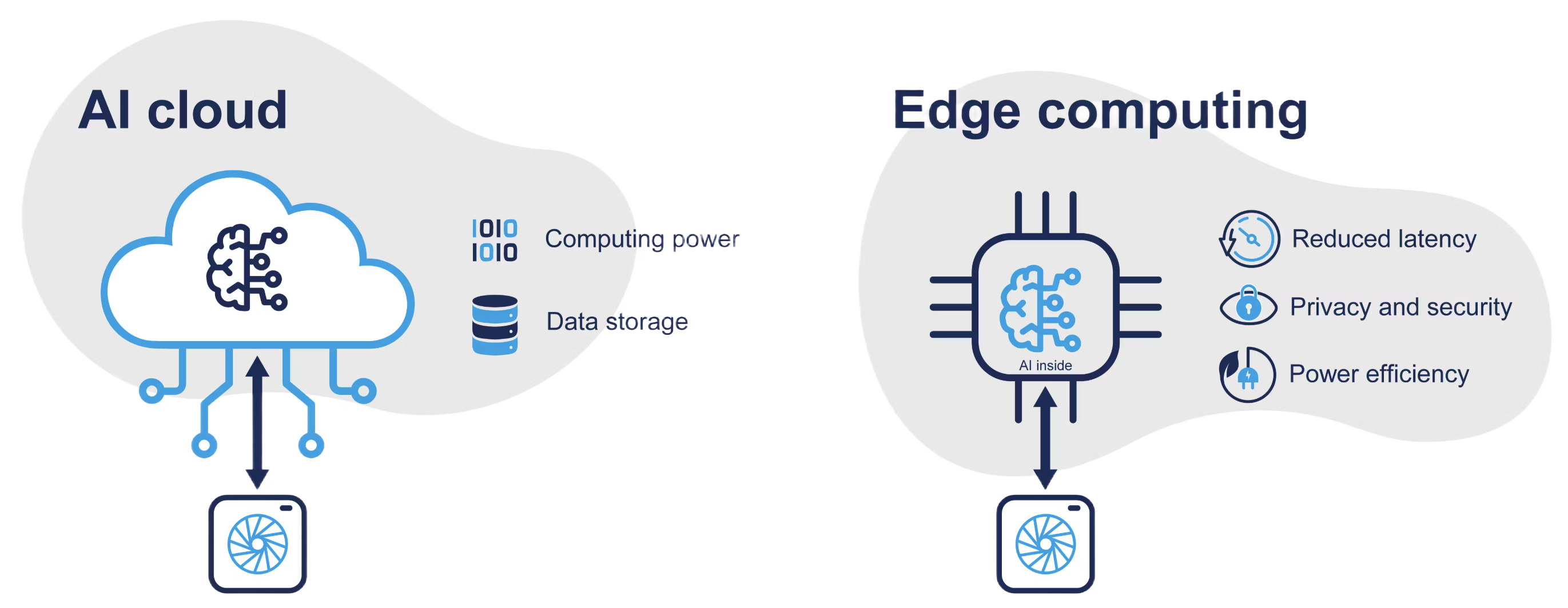
Krabot端云协同架构示意图
目标是积累40万条高质量操作数据,达到类似CLIP模型训练的数据量级,建立多模态理解能力
双臂机器人技术的本质突破不在于某一单点技术创新,而是对整个问题框架的重新定义:
这一系统性创新使得我们能够突破以往的技术瓶颈,在商业可行的条件下逐步实现双臂机器人的智能化,为整个行业开辟新的发展路径。
Krabot双臂系统采用了类似特斯拉的产品哲学:今天购买的是一款有趣的遥控玩具,明天它将成为您家中的智能助手。每一台Krabot出厂时都已配备了具身智能芯片,为未来的能力进化奠定了硬件基础。
刚开箱的Krabot就是一款令人惊叹的高级遥控玩具。通过直观的手机APP或VR控制器,您可以精确操控双臂完成各种任务,体验前所未有的操控乐趣。我们精心设计的游戏化界面让控制过程变得简单有趣,即使是孩子也能快速上手。
随着第一批OTA更新的推送,Krabot开始展现初步的智能辅助能力。它能识别常见物品,在您操控时提供智能建议,自动调整抓取力度和角度,大幅提升操作成功率。系统会记住您的操作习惯,逐渐适应您的使用风格。
半年后,随着数据积累和算法优化,Krabot能够自主完成特定场景下的任务。例如,当您说"整理桌面"时,它能识别桌上物品并将它们分类摆放;当您说"捡起袜子"时,它能在房间中寻找并收集散落的袜子。您仍可随时接管控制,但在大多数情况下,简单的语音指令就足够了。
经过一年的进化,Krabot已能在大多数家庭环境中实现高度自主操作。它不仅能理解复杂指令,还能根据环境变化自主调整策略。例如,它能识别家中新添置的家具,理解物品的功能和适当的处理方式,甚至能预测您的需求,提前完成准备工作。
随着技术的持续进步和数据的不断积累,Krabot将最终达到L4级自主智能水平。在这一阶段,它能在几乎所有家庭场景中自主运行,无需人工干预。它不仅是一个清洁工具,更是家庭环境的积极管理者,能主动识别并解决问题,为您创造更舒适的生活环境。
每台Krabot出厂时都配备了强大的具身智能芯片和充足的计算资源,所有未来功能所需的硬件均已内置。这意味着您今天购买的产品将通过OTA更新持续获得新功能,无需额外硬件投资。
就像特斯拉汽车随着软件更新不断获得新功能一样,您的Krabot将随着时间推移变得越来越智能,投资回报率持续提升。
Krabot的进化不仅依靠我们的研发团队,更依赖于用户社区的集体智慧。每一次您操作Krabot,都在为AI模型提供宝贵的训练数据;每一个您解决的难题,都在为所有Krabot用户创造价值。
加入Krabot社区,您不仅是用户,更是这场机器人革命的参与者和贡献者。通过分享您的使用体验、创意玩法和解决方案,您将直接影响产品的进化方向。
数据显示,社区驱动的进化模式能够显著加速智能系统从L2到L4级别的发展速度。通过对比传统封闭研发与Krabot开放社区模式,我们可以清晰地看到数据驱动的飞轮效应带来的指数级加速。
仿生蟹式智能清洁机器人
折叠式机械臂扫地机

顶置折叠机械臂扫地机

通过对比可以看出,Krabot在机械臂设计和功能性方面具有显著优势: