随着智能家居市场的不断成熟,扫地机器人已从基础清洁工具升级为家居智能助手。石头G30 Space和追觅机械手扫地机等单臂机械臂扫地机的推出标志着行业进入了新阶段,但单臂设计在执行复杂任务时仍有明显局限。我们提出的双臂可拆卸模组扫地机器人旨在突破这些限制,为用户提供更全面的家居清洁与整理解决方案。
项目背景与概述
产品概述
本产品由三部分组成:
- 扫地机器人主体:基于TOF等传感器的智能避障底盘,无激光雷达设计保证低高度通过性
- 双臂机械臂模组:圆盘状模组(高5cm,直径30cm),两侧配备5关节机械臂,可折叠收纳
- 多功能基站:负责充电、集尘、模组自动安装拆卸、末端执行器存储与更换
核心创新点
- 可分离双臂模块:平时机器人可轻盈高效地完成基础清洁,需要时自动安装双臂模组执行复杂任务
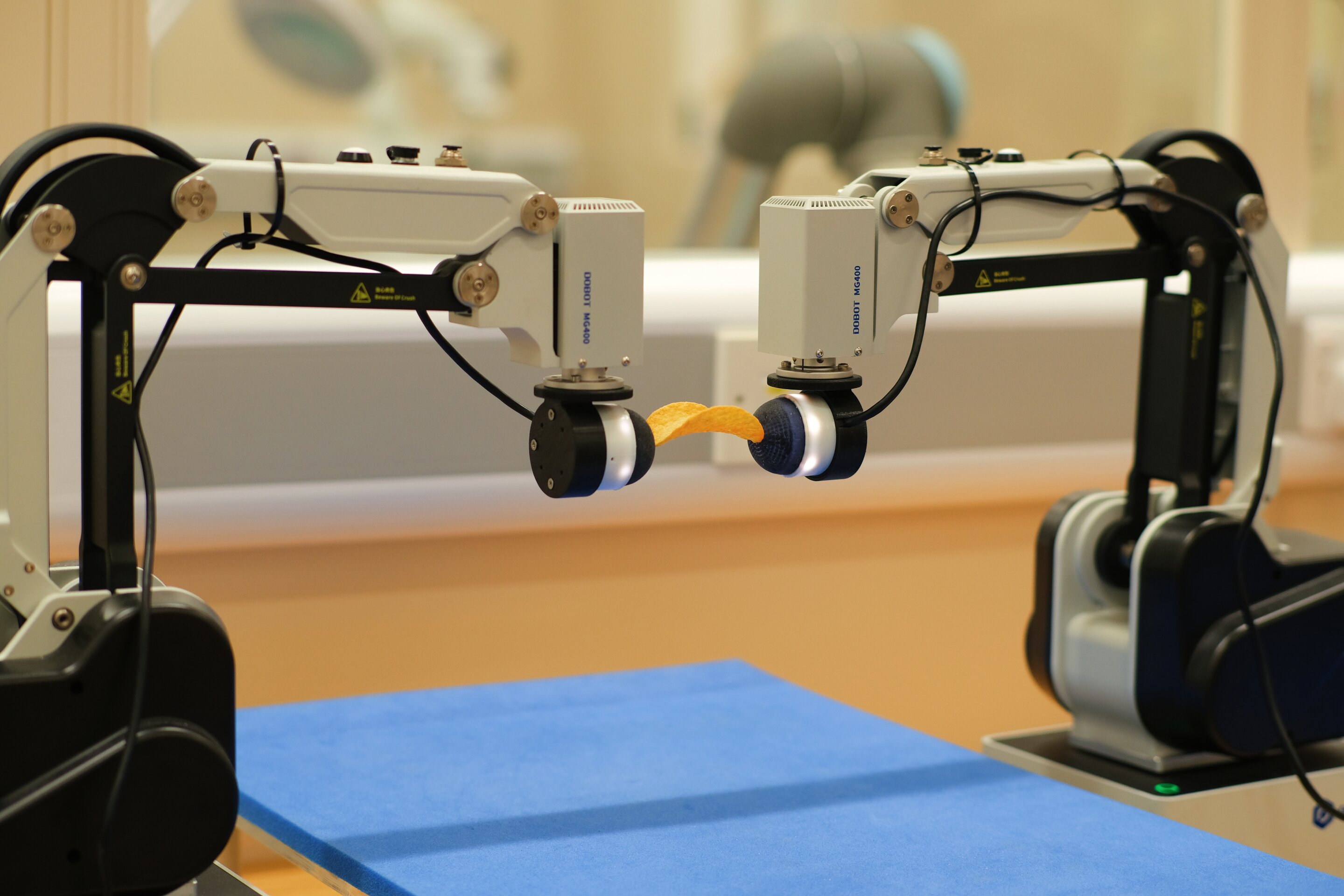
- 双臂协同操作:突破单臂局限,实现同时固定和操作、两侧同时工作等高级功能
- 末端执行器自动更换:根据任务需求自动更换刷子、吸口等专用工具
- AI驱动的任务规划:基于环境感知自动规划双臂协同任务
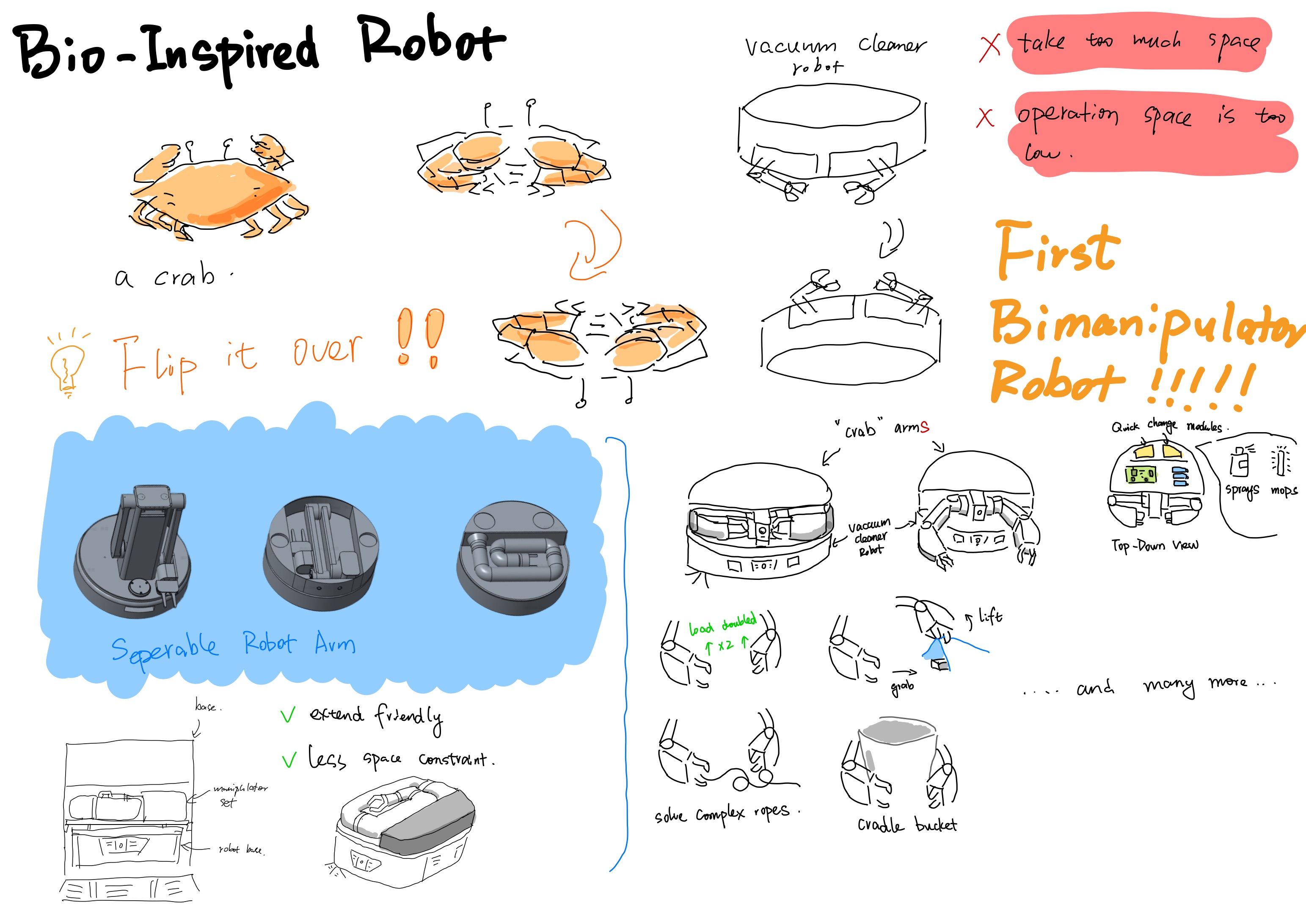
Krabot双臂可拆卸模组概念设计,展示了创新的仿生蟹式机械臂与模块化结构
双臂可拆卸模组概念图 - 灵活的分体式设计让机器人在低矮空间和复杂任务之间无缝切换